
The Raptors' Robot Hall of Fame
Each year, we design, build, and name a new robot for the new season's game. Each robot performs loyally and faithfully over the year. When you spend a year taking these robots around to tournaments and meetings, especially the travel experience of the World Championships, you become rather fond of them, almost as though they're another teammate. Here is a showcase of all of our robots so far.
"Jim the Protobot," (2010)
 We never did take any pictures of "Jim;" this robot simply looks like "Jim" and showed up on Google Images. |
Game: VEX "Let's see if we can get this stupid thing to drive straight!"
Awards: "The Swerving Award." While we were learning the VEX system, part of our team half-built a protobot to try out our programs with. When we were done, and designs for our first competition robot were taking shape, "Jim" died. |
"Dave the Tumbler," (2010)
|
Game: N/A
Awards: None Description: While half of our team built "Jim," the other half learned and practiced their skills with "Dave the Tumbler." "Dave" often beat on "Jim," and the two factions enjoyed competing to complete a task before the other. "Dave" usually won these challenges. Despite this, his fate was the same as that of "Jim." |
 Like "Jim," "Dave" was never photographed and is thus represented by a random picture of a Tumbler. |
"Samuel Dali," (2010-2011)
 "Dali" at the MSU tournament with the Tournament Champion and Excellence Awards, after we won the tournament as a member of the Blue Alliance. 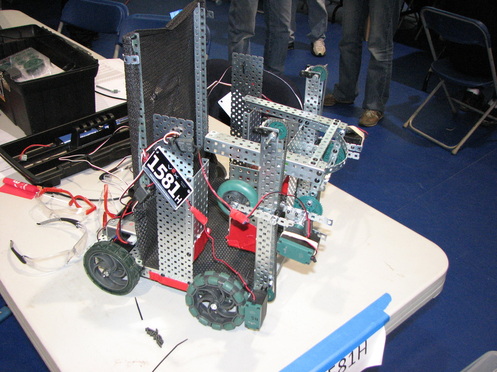
|
Game: VEX Round Up
Awards: Judges' Award, Build Award, Tournament Champion, and Excellence Award. Description: When we started the competition season, we decided to have a forklift robot to score the Round-Up loops onto the scoring posts. Because of the different-colored loops, we decided to name this robot "Sam," after Toucan Sam of the Fruit Loops. But then, we saw a short film called "The Death of Salvador Dali," (which is hilarious, by the way) and named it "Dali" (it wasn't until later that we put the full name together; we wanted to enter him into a raffle but we didn't want to be obvious). He changed and grew a lot over the course of the year, going from a second-rate robot that broke every match to a tournament winning machine. "Dali" served us well in the five tournaments we competed in, and we're proud to call him our first competing robot. For information on "Dali's" performance and evolution, see 2010-2011 Season. 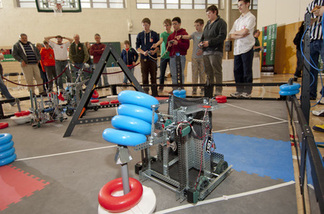
|
"Steve The Scissor Lift," (2011-2012)
|
Game: VEX Gateway
Awards: Think Award (2x), Tournament Finalist, Programming Skills Champion, and Tournament Champion. Description: The design philosophy for "Steve" was this: score in any goal we want to, no matter how high or well-defended that goal is. To accomplish this philosophy, we gave the robot two important features: A 42" scissor lift to raise scoring pieces above even the tallest goals and drop them in; and an immensely powerful wheel base that could overpower other robots that may stand in our way. Unlike "Dali," "Steve's" design did not change much from the beginning of the season to the end. Our problems were mostly electrical, rather than mechanical, and the improvements we made to succeed at our later tournaments revolved mostly around strategy. Steve also earned us qualification to the 2012 VEX Robotics World Championship. He went 5-5-0 at Worlds and ranked 44th. To see more on Steve's season, go to 2011-2012 Season. 
|
PROJECT LOGOS:

|
"The Dominated," (2011-2012)

|
Game: N/A (Purpose is to simulate an opposing robot during practices).
Awards: Never Competed Description: Many schools in our region have several teams, so they practice with each other and get experience interacting with multiple robots on one field. We only have one team and only get this experience during real matches. So, we built a dummy robot to interact with during our practices. Because it's purpose is to be beaten by our competitive robot, we named it "The Dominated," as opposed to "The Dominator." |
"HAL," (2012-2013)
|
Game: VEX Sack Attack
Awards: Sportsmanship Award, Design Award (3x), and Tournament Finalist. Description: "HAL" is designed to control the game of VEX Sack Attack by being capable of scoring all goals, and by removing sacks from the opponents' troughs and putting them into our own goals. "HAL" evolved significantly over the course of the season and competed in the 2013 VEX World Championship, going 3-4-0 and ranking 68th. 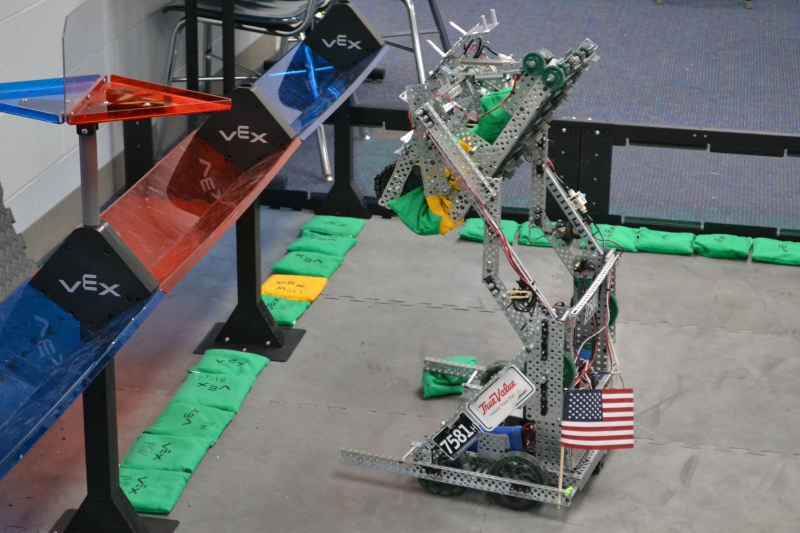
|
|
"Bane," (2013)
|
Game: VEX Sack Attack
Awards: Never Competed Description: Designed to be an advanced strategy robot for 2013 Worlds, this robot had a super-high-torque forklift for lifting defensive "wallbots" to remove them from their strategic position. Its elastic super-dumping system was capable of lifting 30+ sacks to trough level for last-minute scoring. "Bane" was disassembled when we decided to use "HAL" for Worlds, due to the sudden decrease of known "wallbots" going to the championship. |
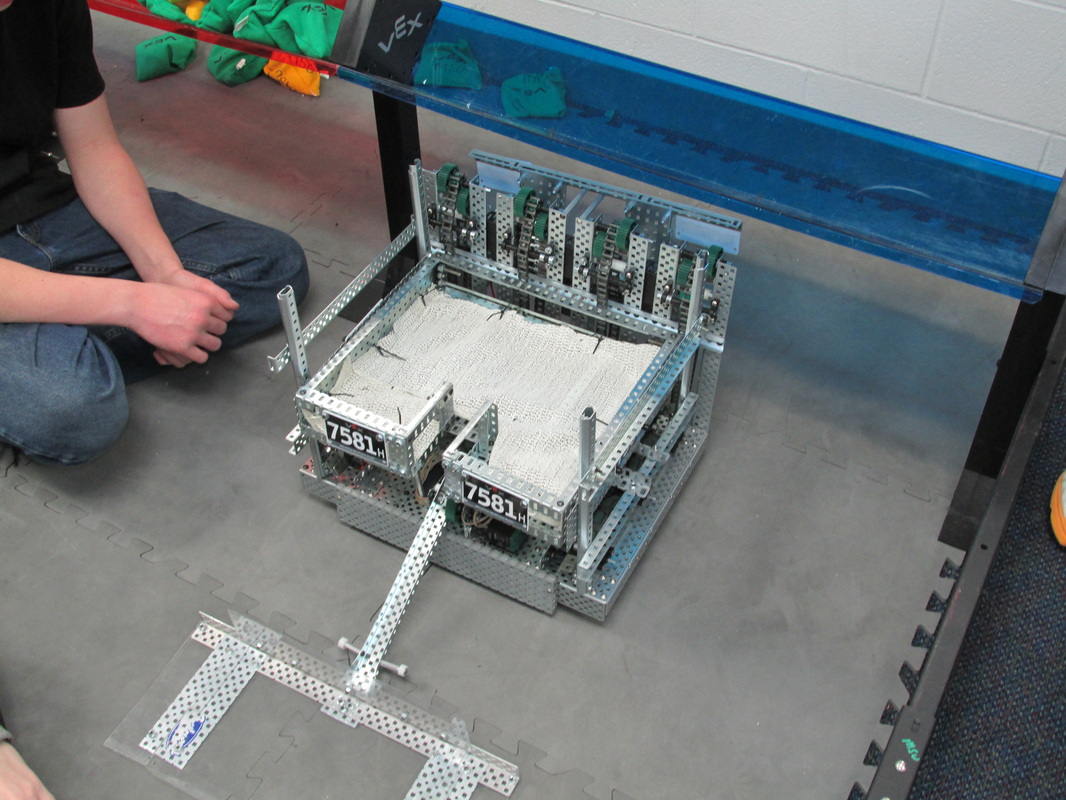
"Donkey-Kong" (2013)
|
Game: VEX Toss Up
Awards: Design Award Description: This robot, which only used 5 motors, was an early prototype for part of a much more impressive design. Its elastic catapulting system was tightened and reset by a motor geared to a rack-and-pinion setup, and was released by a pneumatic piston. It competed at one scrimmage, ranked 7th out of 10, and was eliminated in the quarterfinal. We then abandoned the concept in favor of something simpler and more strategically viable. |
|
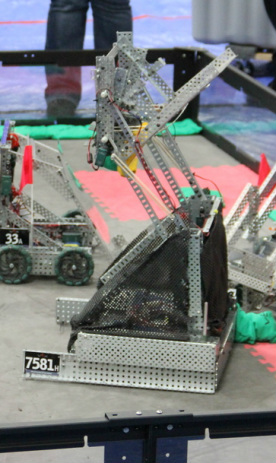
"Kitt," (2013- )

|
Game: VEX Toss Up (2013-2014)
Awards: Design Award (2x), WC-Qualifying Tournament Semifinalist, Tournament Finalist (2x), Excellence Award (3x), World Championship Excellence Award. Description: Our first high-speed efficiency robot, designed to pick up all sizes of objects in the game and score them for maximum point values as quickly as possible. More sensors were put on this robot than any of our previous robots, making it significantly more accurate in autonomous mode. This robot has been our most successful in competition, and was the first Raptor robot to rank 1st after the qualifications at a tournament (at States, no less) and be on one of the top 4 alliances at every competition, including the World Championship Eliminations. "Kitt" is also our only robot ever to live indefinitely beyond its competing season. Purchased from our team by Michigan State University, this robot is now on display at the MSU College of Engineering. |

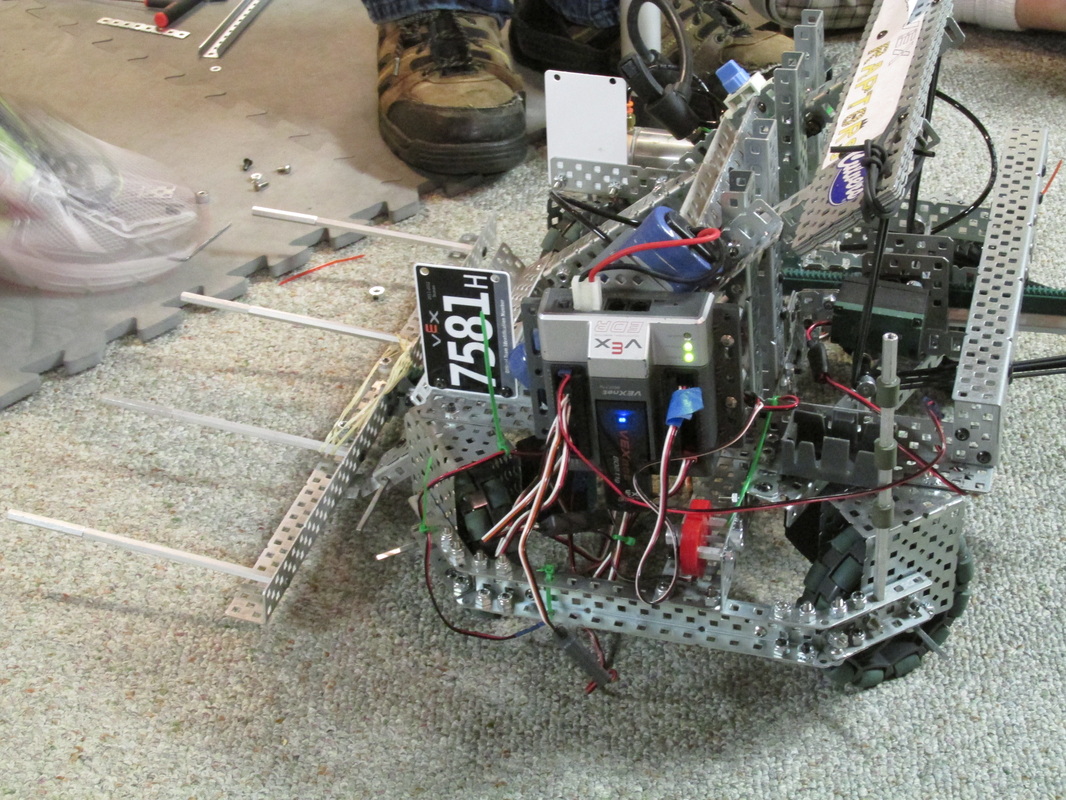
"Data," (2014- )

Game: VEX Skyrise (2014-2015)
Awards: Excellence Award, Design Award (2x),
Tournament Finalist.
Description: This robot dwarfs all of our previous robot. Built to score on a goal 60" high, the robot towers over
us at a height of 78" or 6'6". Already qualified for States
and Worlds, this robot is constantly improving between regional tournaments to perform its best.
Awards: Excellence Award, Design Award (2x),
Tournament Finalist.
Description: This robot dwarfs all of our previous robot. Built to score on a goal 60" high, the robot towers over
us at a height of 78" or 6'6". Already qualified for States
and Worlds, this robot is constantly improving between regional tournaments to perform its best.
