

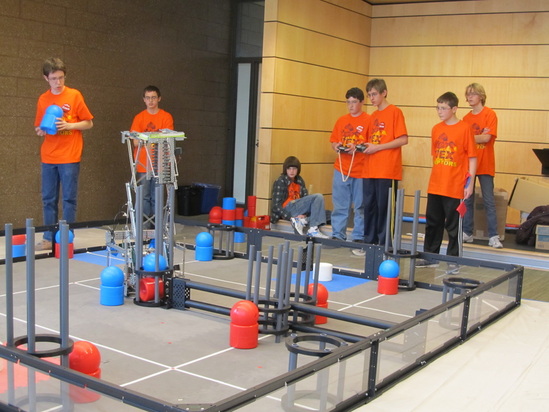
Our team (from left to right): Hannah, A.J., Kearney, Connor, Matt, "Steve", Coach Claus, Nik, and Austin.
The 2011-2012 Season
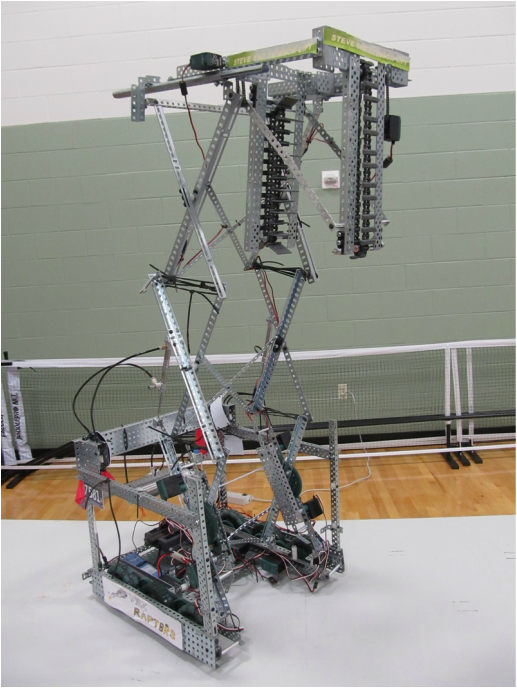
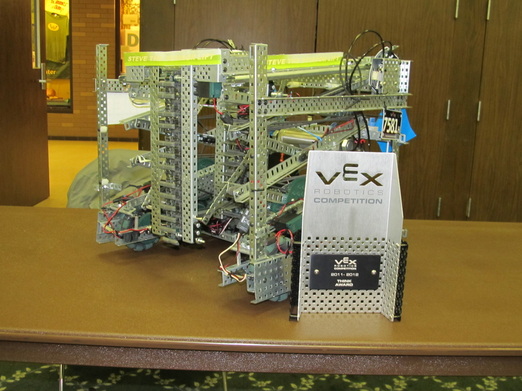
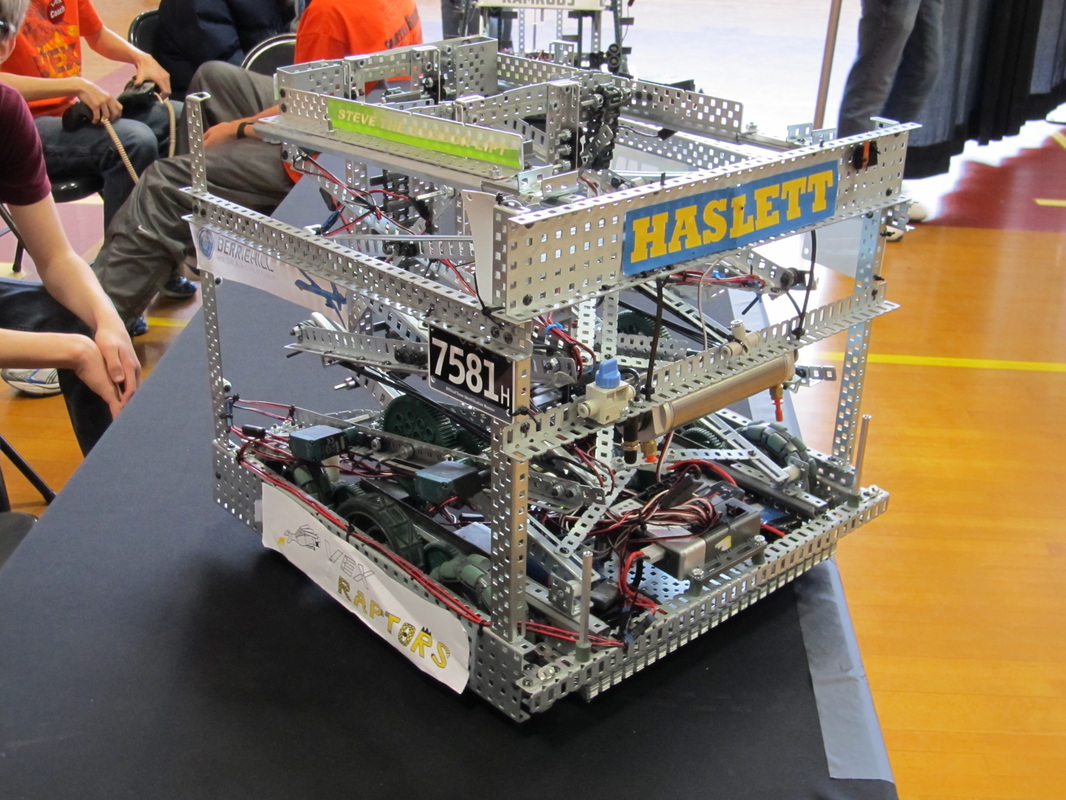
At the beginning of the season, our number changed to 7581H (only our connections at MSU know precisely why). But our number plates had already been ordered as 1581H, so we had to scribble over the 1 with sharpie and write a 7 on it in whiteout the day before our first tournament. Our Gateway robot, "Steve", is a scissor-lift scorer with a high-power drive system that allows it to push other robots and obstacles out of its way with ease. Steve can reach a goal at any height and can score three pieces at a time.
The 2011-2012 game is called VEX Gateway. It features very different challenges than Round-Up.
During this season, we compete in four tournaments in our area: Cranbrook, Wayne State, Grandville, and MSU. Between these four tournaments, we have eleven opportunities to qualify for the World Championships: 4 ways at Cranbrook, one way at Wayne State, one way at Grandville, and 5 ways at MSU.
The 2011-2012 game is called VEX Gateway. It features very different challenges than Round-Up.
During this season, we compete in four tournaments in our area: Cranbrook, Wayne State, Grandville, and MSU. Between these four tournaments, we have eleven opportunities to qualify for the World Championships: 4 ways at Cranbrook, one way at Wayne State, one way at Grandville, and 5 ways at MSU.
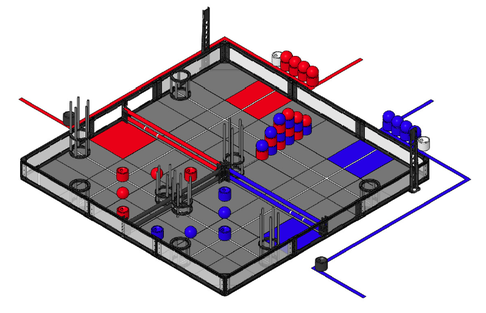
The 2011-2012 game, Gateway, features the red and blue alliances placing balls and barrels in goals of varying heights to gain more points than their opponents. The white barrels double all points in a goal, and the black ones reduce a goal to zero.
Cranbrook Tournament:
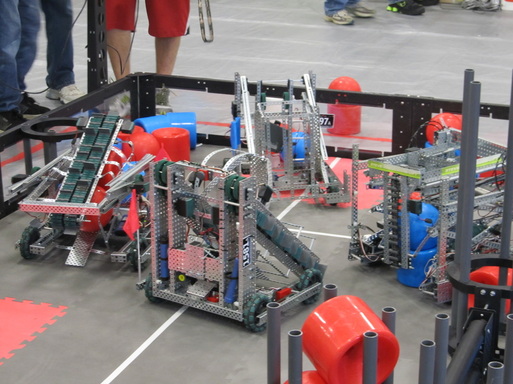
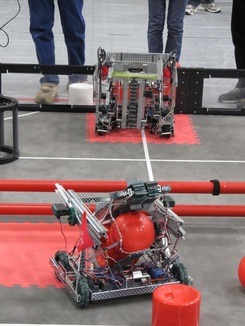
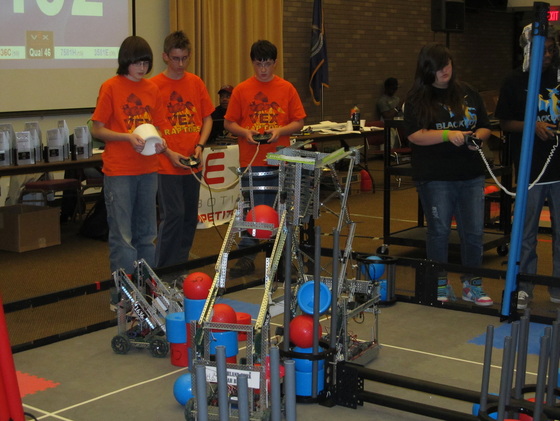
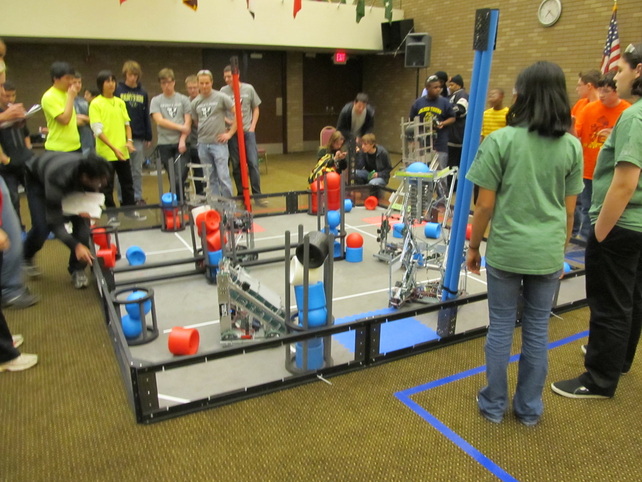
"Steve," on the right, faces both DeWitt teams in our first match of the season. On a completely unrelated note, we lost that match.
"Steve" fills the central 30" goal. Later during the match depicted here, we dropped a white Doubler Barrel onto this goal and it alone was worth 14 points.
To practice for later events where only the Excellence Award winner goes to the World Championships, we did runs in the Robot Skills Challenge. Because we didn't have a working autonomous program, however, we didn't do Programming Skills.
|
Us and our allies from DeWitt and Cranbrook flattened another Cranbrook team and its allies and dominated the Quarterfinal round. (Above and Left)
|
Having won our Quarterfinals, we progressed to the Semifinals against the 1st Place Alliance: Cranbrook's Athena Rising and two of Pontiac's Killer Bees.

Our ally from Cranbrook blew out a motor. So, back at the pit tables, the rest of our alliance prepares for the coming semifinal round.
|

In the Semifinals, the VEXnet partner joystick we use to control our lift and conveyors had a firmware bug and did not connect. Only the wheels worked, so we could not score in raised goals. In addition, DeWitt's VEXnet key came loose so their robot disconnected too. We got pasted by the 1st Alliance.
|
Wayne State University Tournament:
Our robot had improved little since the last tournament. The only major modifications were the regearing of our drive motors to torque and the elimination of small chain in our vertical conveyor system. We also modified our strategy to score more points at once and to include and autonomous program that scores 2-3 pieces.

Our first several matches were spectacular. We nearly beat two of the best teams in our region: Cranbrook's Vexellent and Athena Rising (had they not negated us, we would've won by many points). Rivaling the Titans of our area, we were confident that we would come out high.

In one of our matches, an improperly attached goal caused our autonomous program to fail and then promptly fell over during an interaction with our robot. Keen to avoid this sort of thing happening again, we made the tournament staff go back and build it right. Little did we know, this would take half an hour and 4 engineers to accomplish.
We peaked at 3rd place before a festering electrical issue took hold and dragged us down.
|
In the later qualification matches, our wheel motors reached stalling current and tripped the circut breaker in our power expander. This would cut our drive system and render our robot immobile.
|

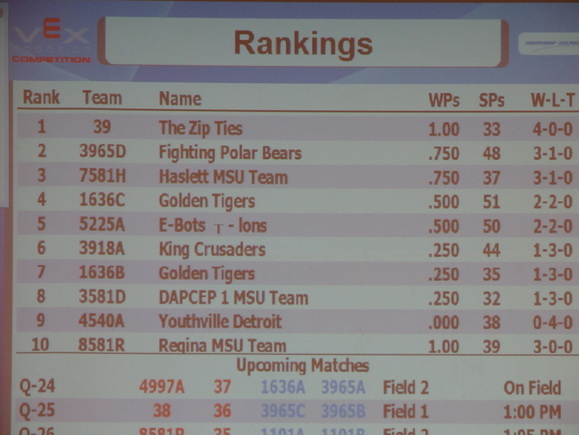
This problem put us in 17th place (a significant improvement on our last tournament), which is one of the best spots to be in.
|
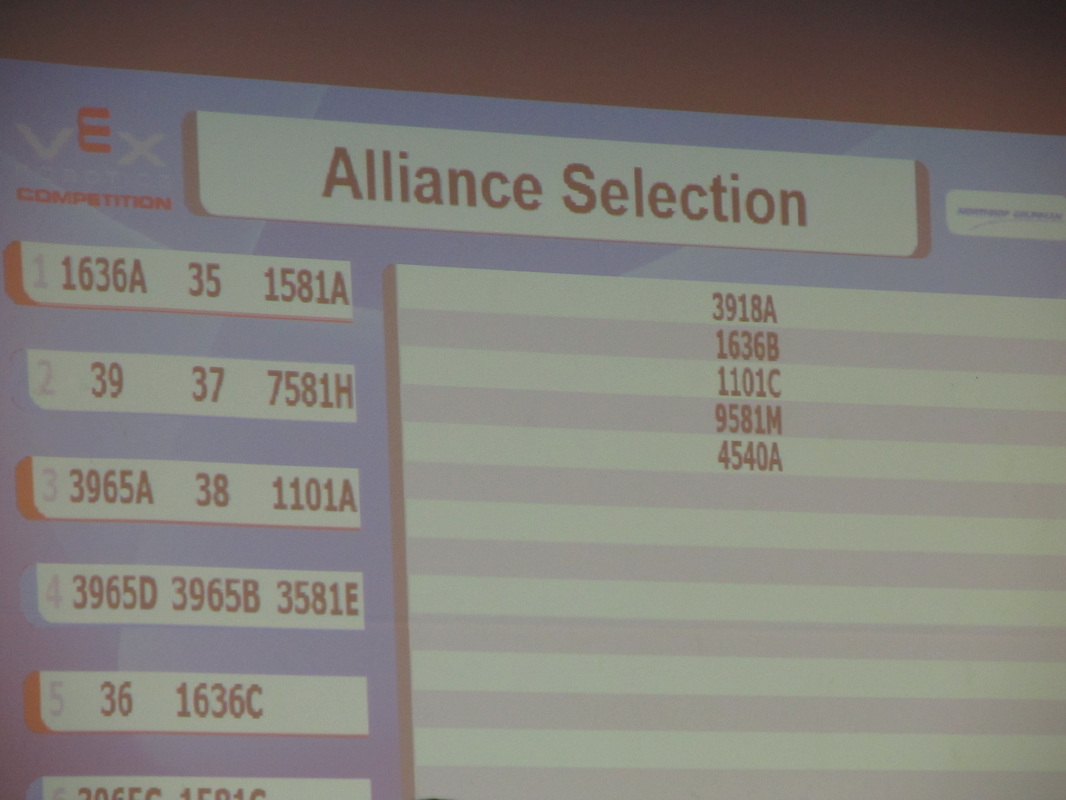
Once the eight alliances each have two teams, the 17th team is the highest unpicked team. We were chosen into the 2nd Seeded Alliance with Cranbrook's "The Zip Ties" and "Athena Rising."
|
Our alliance swiftly defeated the 7th Alliance and advanced to the semifinals.

In the first match of the round, we won. In the second, however, we tied 16-16.
|
In an extremely rare occurence, we tied our next match as well and a fourth had to be played. The tired referee suggested Rock Paper Scissors, but the round went on and we moved on to the finals.
|
In the finals, our stalling problem came up again and we spent the majority of the match being completely useless. Our opponent won by only two points; a gap that would easily have been closed if our robot had not cut out.

Despite our loss in the Finals, we were proud to win our first award of the season: The Think Award. This award is given for a well-thought-out strategy and an effective Autonomous program.
Grandville Tounament:
The robot had not changed much before this tournament. We took the pneumatics off of the scissor lift for a different purpose, however this purpose was found to be impractical. The pistons were never reattached. This did not change robot performance, though, as the lift did not need them.

Our autonomous program had been made faster, preventing other robots from scoring in the central goal before "Steve" did.

In an early qualification match, we faced both of the DeWitt High School teams, who are both very skilled. Our ally was not such a skilled team. Despite being practically alone facing two skilled teams, however, we tied the match.

|

|
Our Qualification matches ran brilliantly. We won match after match in a streak of domination.

Overall, we were ranked 2nd. The 1st place team, DeWitt 1581A, picked us as their ally and we picked the Belding Holy Rollers as our third alliance member. All three of our robots stood above others in scoring ability, so our alliance cruised through the semifinals and on into the finals.

Our alliance won the finals swiftly and became the Tournament Champions, qualifying us for the VEX Robotics U.S. National Championships in Omaha, Nebraska.
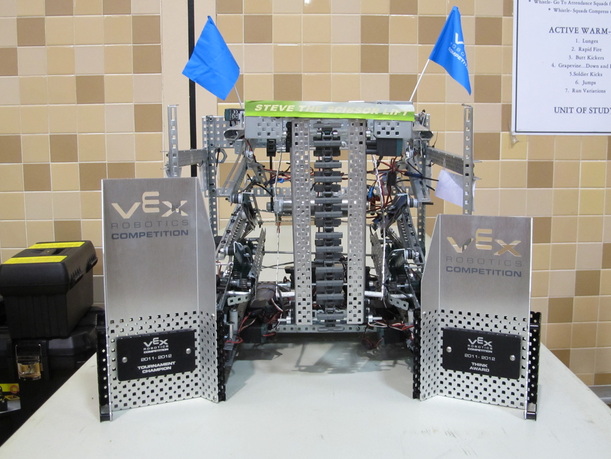
In addition to the Champion trophy we won, we were also given another Think Award for the most effective autonomous program at the tournament. The accomplishments that we'd made were observed by VEX Officials and resulted in our qualification to the VEX Robotics World Championships in Anaheim, California.
MSU Tournament:
At this tournament, the qualification rounds went fairly well for us. We had some unlucky battery problems, but when our robot worked, we usually won. We ranked 9th out of 36 teams, and the 4th rank team, 6581S, chose us as their first alliance partner. Our other partner was DeWitt 1581A, who also played a large role in getting our alliance to the finals.
In the first round of the final, our alliance (Blue) had great runs, and we regard the above match to be one of our best in the season.
6581S and 1581A played the second match, and lost. So, it all came down to the third match. Unfortunately, 1581A's batteries died, and we dropped our doubler barrel, so we lost the match 24-20.

At this tournament, we won the Programming Skills Challenge with a score of 14. We also received a Tournament Finalist trophy for making it to the final round.
VEX Robotics World Championships:
In this match, we are one the Blue Alliance with a team from Taiwan, and our opponents were from the US and Mexico. Our ally played defense, leaving us to do most of the scoring. This strategy worked, and we won!
In this video, we are on the Red side, facing a challenge that we never encountered at the local tournaments: a purely defensive robot, known to some as a "wall-bot." To stop the expanding "wall-bot" from trapping us in our isolation zone, we scored in the strategically important goals and stayed near our starting tile. This allowed us to introduce and use our Doubler Barrel, which helped us to win the match.
More videos and pictures will be added, so check back again!
